1) How each technology works
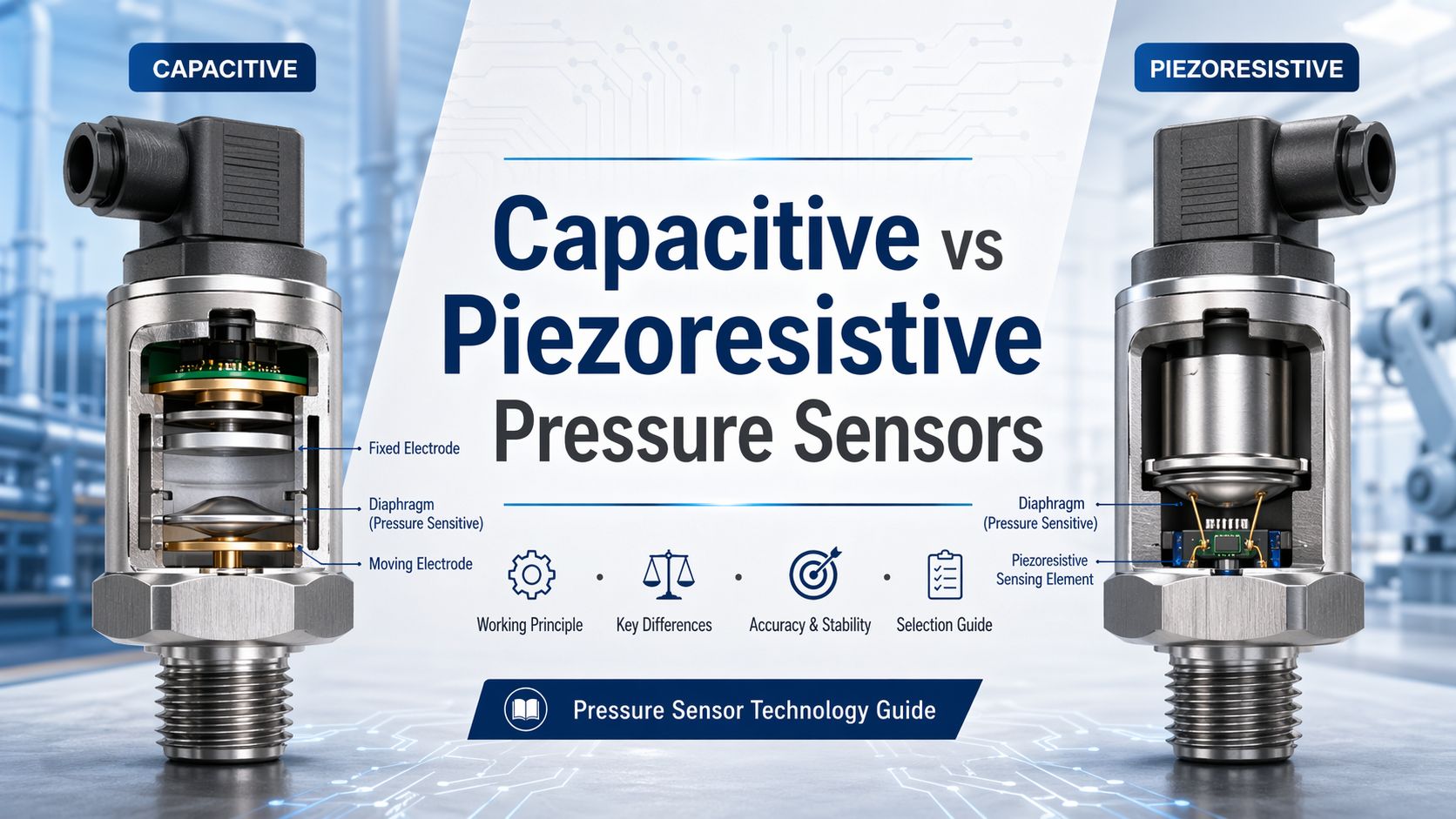
Piezoresistive pressure sensors
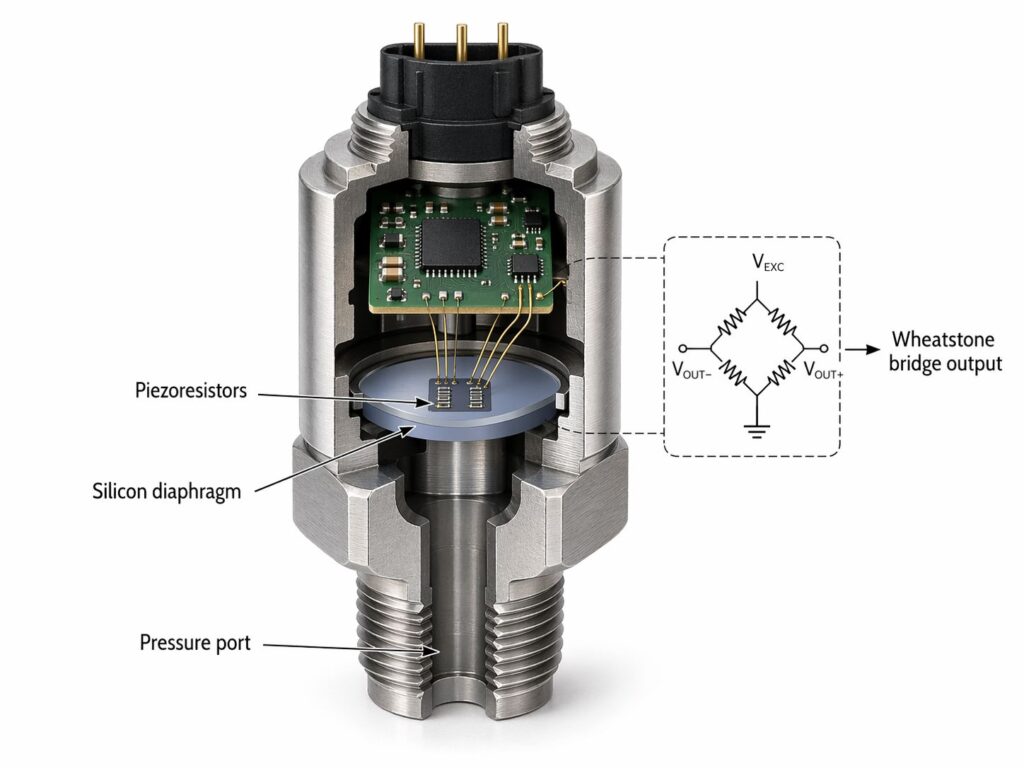
A piezoresistive sensor uses a diaphragm that flexes under pressure. Strain on the diaphragm changes the resistance of piezoresistors, typically arranged as a four-resistor Wheatstone bridge on the sensor die (very common in automotive MEMS pressure transducers).
What you measure: bridge output voltage (often mV/V) proportional to pressure.
Capacitive pressure sensors
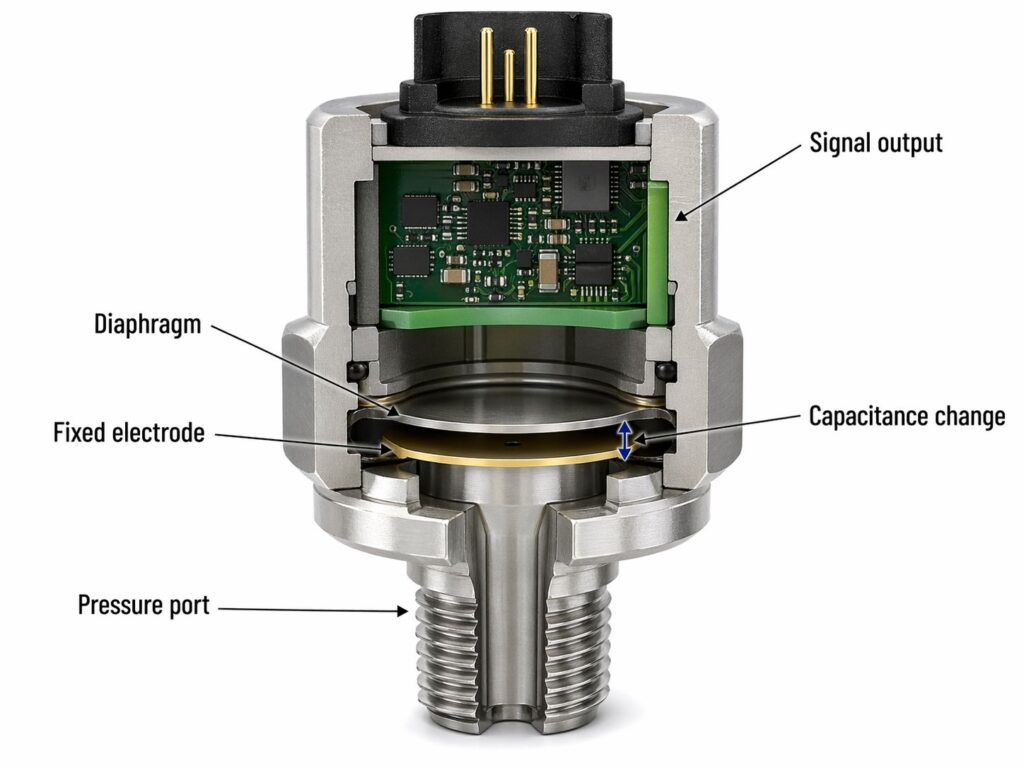
A capacitive sensor forms a capacitor where one plate is a pressure-deflected diaphragm. Pressure changes the diaphragm position (gap), changing capacitance. That capacitance change is read out using an AC method (charge/discharge timing, oscillator frequency shift, etc.).
What you measure: capacitance (or a derived frequency/time signal) proportional to pressure.
4) Application-based decision guide

HVAC duct static pressure / filter monitoring (low DP)
- Often favors capacitive for sensitivity at very low ΔP, but only if you control moisture/EMI/parasitics well.
- Piezoresistive DP sensors are also common; choose based on total error band across temperature and installation constraints.
Hydraulics, compressors, general industrial gauge pressure
- Piezoresistive is typically the default choice: mature, durable, simple readout, wide range availability.
Battery-powered / wearable / implanted / passive-readout concepts
- Capacitive can be attractive because it can be inherently low-power and can be integrated into resonant/AC readout schemes.
Environments with challenging EMC or long cabling
- If you can’t guarantee short connections + shielding, piezoresistive often reduces risk (simpler analog chain).







